Hybrid Swarm Robotics for Autonomous Deep-Sea Exploration and Biodiversity Mapping in Uncharted Marine Zones
Keywords:
Hybrid Swarm Robotics, Deep-Sea Exploration, Biodiversity Mapping, YOLOv7, CNN-LSTM, Reinforcement Learning, Multimodal SensingAbstract
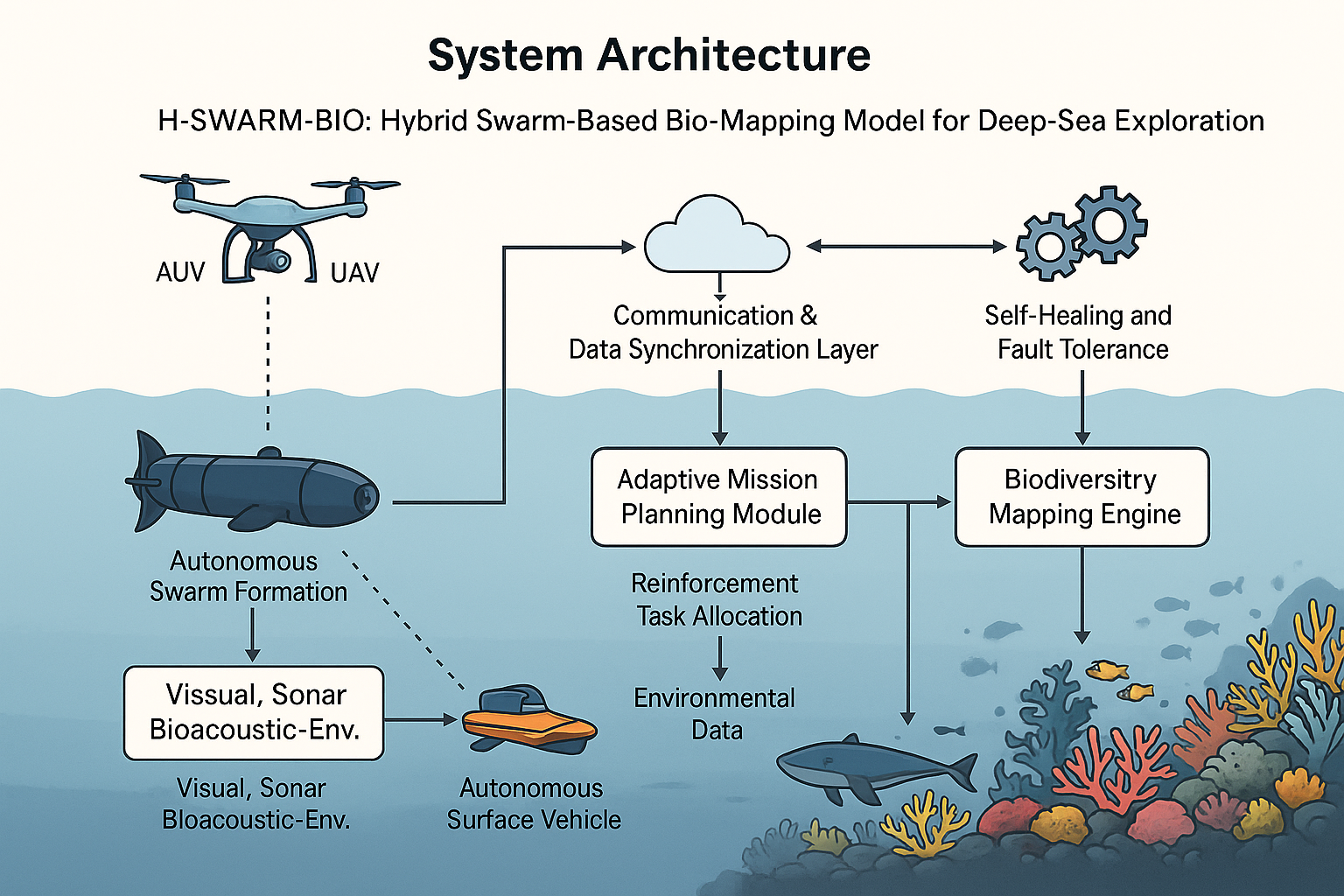
Deep-sea environments remain one of the least explored frontiers of the Earth, primarily due to inaccessibility, extreme physical conditions, and the limitations of existing robotic and sensing systems. Traditional exploration methods are either manually operated or restricted to centralized control architectures, lacking the autonomy, scalability, and robustness required for biodiversity monitoring in uncharted marine zones. This study proposes a hybrid swarm robotics framework for autonomous deep-sea exploration and real-time biodiversity mapping using intelligent, decentralized coordination and multimodal sensing. The proposed H-SWARM-BIO system integrates a heterogeneous swarm of Autonomous Underwater Vehicles (AUVs), Autonomous Surface Vehicles (ASVs), and Unmanned Aerial Vehicles (UAVs) coordinated via a deep reinforcement learning-based mission planner. The framework combines YOLOv7 for visual species detection and CNN-LSTM for acoustic signal classification. Species distributions are inferred using Kernel Density Estimation (KDE) and ecological diversity indices, supported by datasets including DeepFish, Fish4Knowledge, and the JASCO bioacoustics archive. Experimental results demonstrate superior performance over four baselines. YOLOv7 achieved an mAP@0.5 of 83.6% and average IoU of 78.9%, while CNN-LSTM yielded an F1-Score of 87.8% and AUC-ROC of 91.2%. Swarm coordination improved coverage to 86% with a fault recovery time of 6.7 seconds. Biodiversity maps generated by the system exhibited a spatial correlation of 0.88 and a Shannon Index of 2.33. H-SWARM-BIO advances the state of autonomous marine robotics by unifying real-time sensing, swarm intelligence, and ecological modeling. The framework shows strong potential for scalable, real-world deployment in long-duration marine biodiversity missions.
Downloads
Published
Issue
Section
License

This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License.
This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License. You are free to share and adapt the material, but only for non-commercial purposes. You must give appropriate credit to the author(s).