Event-Driven Neuromorphic Architecture for Continual Learning in Robotic Vision Without Catastrophic Forgetting
Keywords:
continual learning, neuromorphic computing, spiking neural networks, event-based vision, catastrophic forgetting, robotic vision, energy-efficient AIAbstract
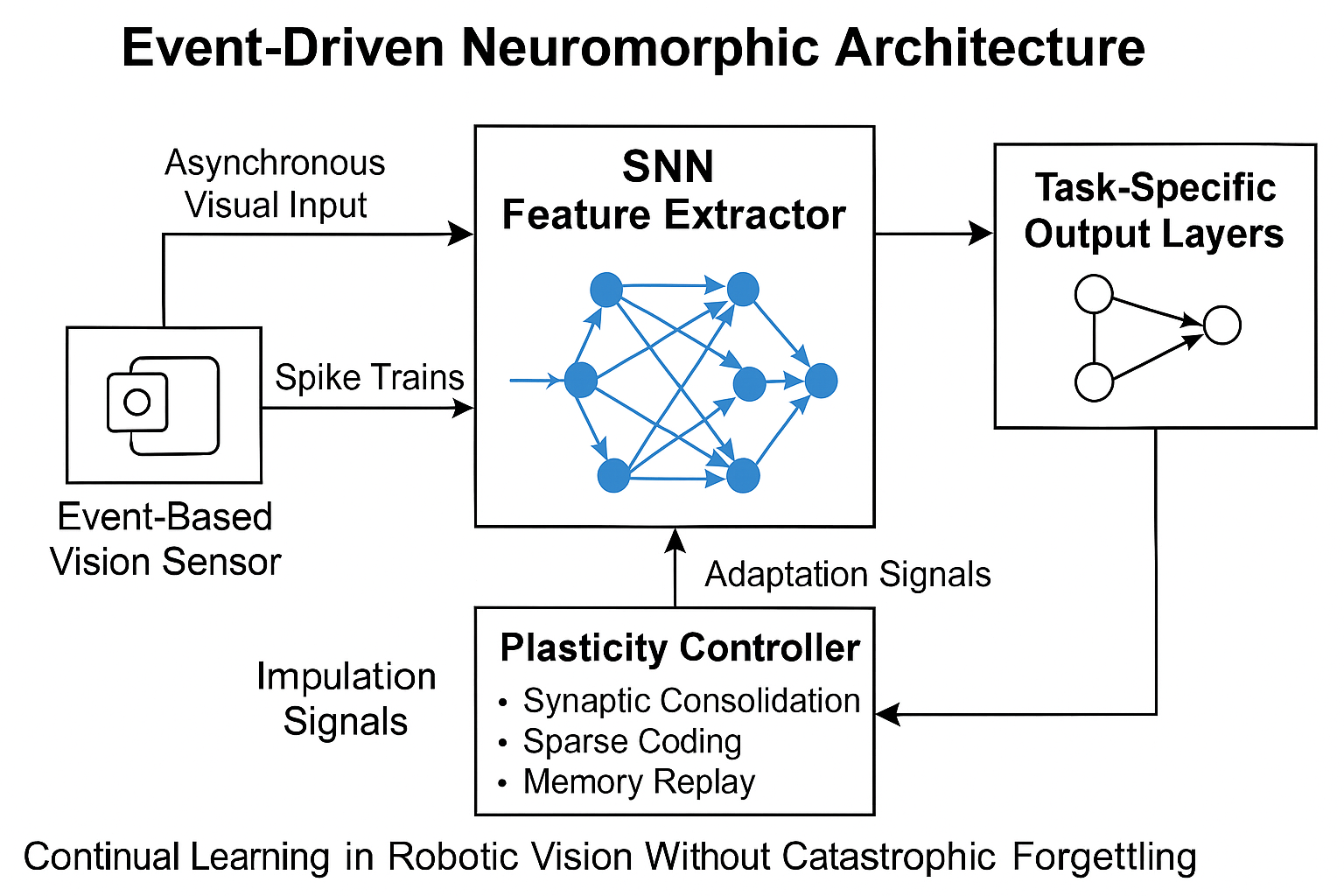
Continual learning in robotic vision systems remains a significant challenge due to catastrophic forgetting, where learning new tasks leads to the loss of previously acquired knowledge. This limitation is especially critical in dynamic, real-time environments where energy efficiency and memory retention are essential for autonomous robots. This study proposes an Event-Driven Neuromorphic Architecture (EDNA) designed to enable continual learning in robotic vision without catastrophic forgetting. The system integrates event-based vision sensors, spiking neural networks (SNNs), and biologically inspired mechanisms—including synaptic consolidation, sparse coding, and memory replay—within a unified framework. The architecture is evaluated on two neuromorphic datasets: N-MNIST and DVS Gesture. Performance is benchmarked against conventional deep neural networks with regularization methods (EWC, LwF) and baseline SNNs. Training is conducted in a task-incremental setting using surrogate gradient descent, and the architecture is designed to be compatible with neuromorphic hardware platforms like Intel Loihi. The proposed EDNA achieves an average accuracy of 91.4% on N-MNIST and 88.7% on DVS Gesture, with average forgetting rates reduced to 6.1% and 7.3%, respectively. Furthermore, it consumes up to 3× less energy per inference compared to ANN-based methods. These results demonstrate that EDNA effectively supports lifelong learning in robotic vision with superior memory retention and energy efficiency. The architecture presents a scalable and hardware-efficient solution for deploying real-time adaptive learning systems in mobile and autonomous robots.
Downloads
Published
Issue
Section
License

This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License.
This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License. You are free to share and adapt the material, but only for non-commercial purposes. You must give appropriate credit to the author(s).